部分内容来源于网络,版权归原作者所有。若涉及版权问题,请及时联系小编。
学生背景
THE BEAUTY OF LIFE IS WORTH YOUR TASTE
同学
本科:加州大学伯克利分校/计算机专业
GPA:3.8+
GRE:330+
录取结果:MIT、斯坦福、卡耐基梅隆大学等
科研启蒙
来自加州伯克利大学计算机科学专业的Allen给我们的第一印象就是严谨好学。多年的美国学习和生活经历让他很早就确定完成本科后继续在美国深造学习。
同学核心的优势那就是掌握扎实的专业基础知识,具备将理论实现为代码的能力,拥有丰富的编程经验,匹配长期的研究经历,以及具有惊人的自学能力。利用加州伯克利的EECS学院,跨学科研究的优势。经过我们的建议,在大二到大三期间,Allen不仅申请了甲骨文的暑期实习,在平常也更关注科技领域的新潮流,以此弥补了在行业中以产品为导向的开发经验不足的弱势。
伯克利很多实验室共同开展基础研究和应用研究,Allen从事的机器人研究时,研究包括导航和运动规划,安全关键系统的优化,分布式系统的控制,以及在实际系统中实现最终技术。
这些实验室这一领域的综合研究组合包括三个主要方面:
1.控制与决策系统的设计,还需要开发高维确定性或概率模型以及相应的分析或最先进的计算方法。这里特别感兴趣的是控制复杂自治系统的先进方法,包括无人驾驶飞机,自主航天器,空中交通管制和其他系统,其中必须在不确定的动态环境中做出决策,同时保持安全性和效率。
2.分布式控制,重点是混合计算机网络和物理系统。在这里,研究解决了如何系统地设计和实施可证明的安全控制的基本问题。它还研究了支持技术及其瓶颈。因此,这里的研究在于反馈控制理论,分布式系统和通信网络的多学科交叉。它还包括软件开发,可以找到解决各种分布式控制问题的方法,例如机器人运输和电力网络。
3.在极端环境中进行自主,机器人探索,强调关键使能技术的开发和演示。目前的研究项目侧重于展示米级,地图相对导航,用于使用自主水下航行器在深海和冰山周围返回现场任务,以及在微重力环境中测试太空机器人。
申请亮点
敏捷机器人导航
阻止机器人在室内空间中导航第一件事是它缺乏准确的地图。虽然我们当然可以使用SLAM来生成这样的地图,但这非常昂贵,因为机器人每次到达新环境时都需要扫描空间。在这个项目中,我将粒子滤波与AR标签识别相结合,以便机器人可以使用不准确的平面图进行导航。
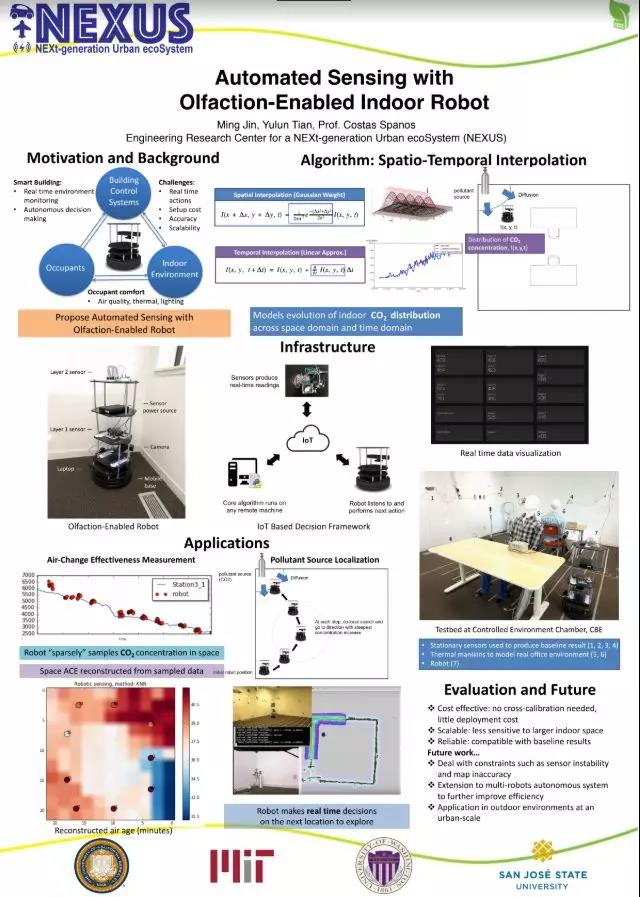
用于换气效能评估的机器人平台
测量换气效果的标准方法需要安装多个传感器站。这些传感器的校准和部署成为一项艰巨的任务,尤其是在空间很大的情况下。在这个项目中,我们提出并评估了一种基于自动机器人平台的室内通风效率的替代剖析方法。
作为软件工程实习生加入了Oracle Solaris平台QE小组。我从事与测试自动化相关的项目,为此我实现了基于模板的测试套件集成过程。我还为可扩展的智能故障分析工具奠定了基础。
在申请时,我们协助Allen同学认真分析每所申请学校的研究方向,结合他在机器人及人工智能应用层面的兴趣,包括机器人运输网络,极端环境中的绘图和导航,敏捷机器人系统的规划和控制等等。帮他筛选出了全美Top10大学最适合他的实验室和导师,这也是最终Allen横扫数枚一流名校录取的秘籍!
最后整套申请材料,不仅向学校展示了 同学过往卓越的学术经历,补充了欠缺的软性背景,而且Allen同学的学术经历,研究方向还有职业发展方向也和学校高度匹配。
最终,同学斩获了MIT,卡耐基梅隆,斯坦福的全部录取!!!
在线服务:
如需进一步了解,欢迎大家在线咨询专业老师
如有任何相关疑问,欢迎请进入答疑中心留言,会有留学专家为您解答。
如果您对自己是否适合出国留学还有疑虑?
欢迎参与前途出国免费评估,以便给您进行准确定位。
【研究生】斯坦福大学物理博士全奖录取 下一篇:

官方小程序

官方公众号

官方微博

百家号
在线时间:7*24小时








